
Research
Our research mainly centers around human modeling and behavior analysis; appearance modeling, inverse rendering, and material recognition; and physics-based vision and computational photography. Be sure to scroll down to the bottom!

MAtCha Gaussians
Photorealistic Gaussians from sparse views that readily provide high-quality mesh.
Neural Optimizer for Multiview HMR
Occlusion-aware multview human shape and pose recovery as learned optimization.
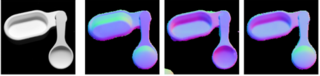
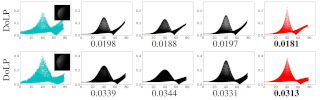
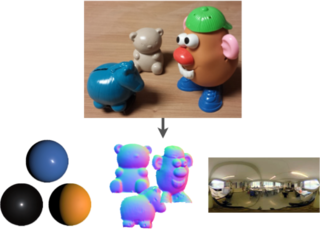
Multistable Shape from Shading
Diffusion-based SFS lets you sample multistable shape perception.

Camera Pose from Reflection
Correspondences in the reflected world enable camera pose recovery without background.

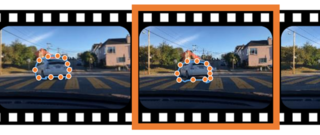
Camera Height Doesn't Change
Camera height invariance enables road-scene metric monocular depth estimation.
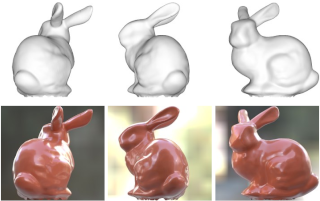
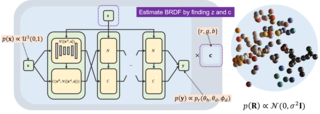
Diffusion Reflectance Map
Single-Image Stochastic Inverse Rendering of Illumination and Reflectance.
Fresnel Microfacet BRDF
THE BRDF model that unifies Polari-Radiometric Surface-Body Reflection.
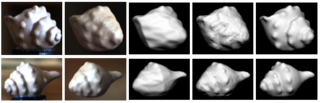
nLMVS-Net : Deep Non-Lambertian Multi-View Stereo
Multi-view stereo for joint shape and reflectance estimation of complex surfaces.
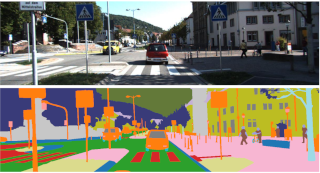
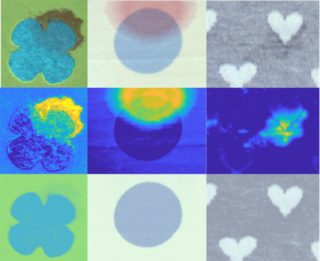
RGB Road Scene Material Segmentation
Road-scene per-pixel material recognition of ordinary RGB images.

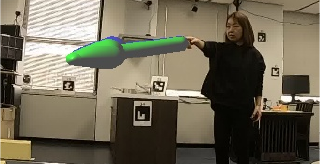
Extrinsic Camera Calibration from A Moving Person
A person is a moving calibration target consisting of easily associative oriented points.


Dynamic 3D Gaze from Afar
Gaze estimation from eye-head-body coordination without relying on the eye appearance.

Multimodal Material Segmentation
Road-scene per-pixel material recognition with multimodal imaging.

Polarimetric Normal Stereo
Binocular stereo of polarization cameras for fine surface geometry recovery.

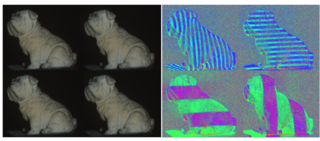
Shape from Sky
The polarization pattern of the sky reflected by the surface gives us per-pixel surface normals.

Consistent 3D Human Shape from Repeatable Action
Clothed human body shape from videos capturing a few instances of a repeatable action.

Non-Rigid Shape from Water
Underwater 3D sensing of consistent, dense 3D shape of a dynamic, non-rigid object.
Dense Video Annotation
Dense video annotation only requiring sparse bounding box supervision.
Invertible Neural BRDF for Object Inverse Rendering
BRDF model with conditional normalizing flow for single-image inverse rendering.

Appearance and Shape from Water Reflection
Water reflection lets us recover 3D geometry with HDR appearance from a single image.

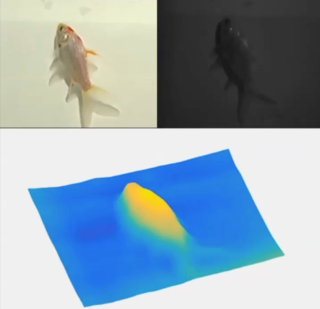
Surface Normals and Shape from Water
Per-pixel surface normals and depth of dynamic objects in water using light absorption.

Variable Ring Light Imaging
Transient subsurface light transport from steady-state surface appearance and ordinary imaging.
Wetness and Dry Appearance Recovery
Spectral appearance model of wet surfaces for recovering wetness and dry appearance from a single image.
Shape from Water
Infrared absorption for real-time shape recovery of underwater objects.
Radiometric Scene Decomposition
Inverse rendering the reflectance, illumination, and geometry, of real-world scenes from a few RGB-D images.

Perceptual Visual Material Attributes
Discovering locally-recognizable material attributes from crowdsourced perceptual material distances.
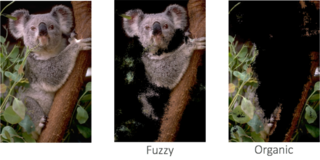
Visual Material Traits
Representing material categories with their inherent properties exhibited in their looks.
Multiview Shape and Reflectance from Natural Illumination
Single-image inverse rendering of shape and reflectance in a canonical probabilistic formulation.
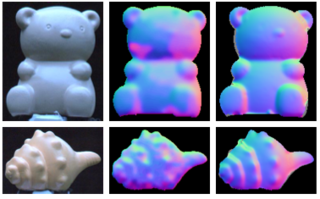
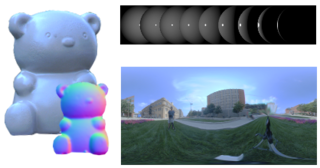
Shape and Reflectance from Natural Illumination
Single-image inverse rendering of complex reflectance and geometry under natural illumination.
Reflectance and Natural Illumination from a Single Image
Single image inverse rendering of reflectance and natural illumination.
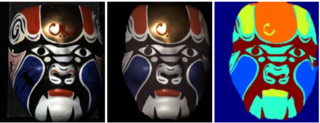
Single Image Multimaterial Estimation
Joint estimation and segmentation of reflectance on an object surface from a single image.
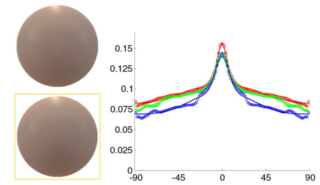
Directional Statistics BRDF Model
A compact yet accurate BRDF reprensentation using directional statistics.
3D Geometric Scale Space
Scale-space representation of surface geometry and scale-dependent/invariant features and descriptors geometry processing.
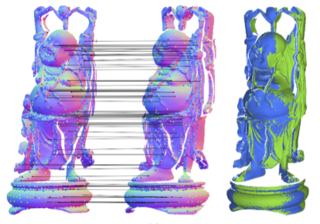
Reassembling Thin Surface Geometry
3D reassembly of fragmented, thin objects based on a novel scale-space representation of contour geometry and photometry.

Tracking People in Crowds
A novel Bayesian framework for tracking pedestrians in videos of crowded scenes with space-time crowd flow model.

Anomaly Detection in Crowds
Modeling and detecting anomalous local spatio-temporal motion pattern behavior of crowded scenes.

Eyes for Relighting
Extracting the surrounding light from a person’s eye for relighting faces.

The World in An Eye
Eyes can tell us where the person is, what the person is looking at, and even the surrounding lighting and object shape in front of her.