
Two-Point Gait: Decoupling Gait from Body Shape
Two-Point Gait: Decoupling Gait from Body Shape
Kyoto University Computer Vision Lab
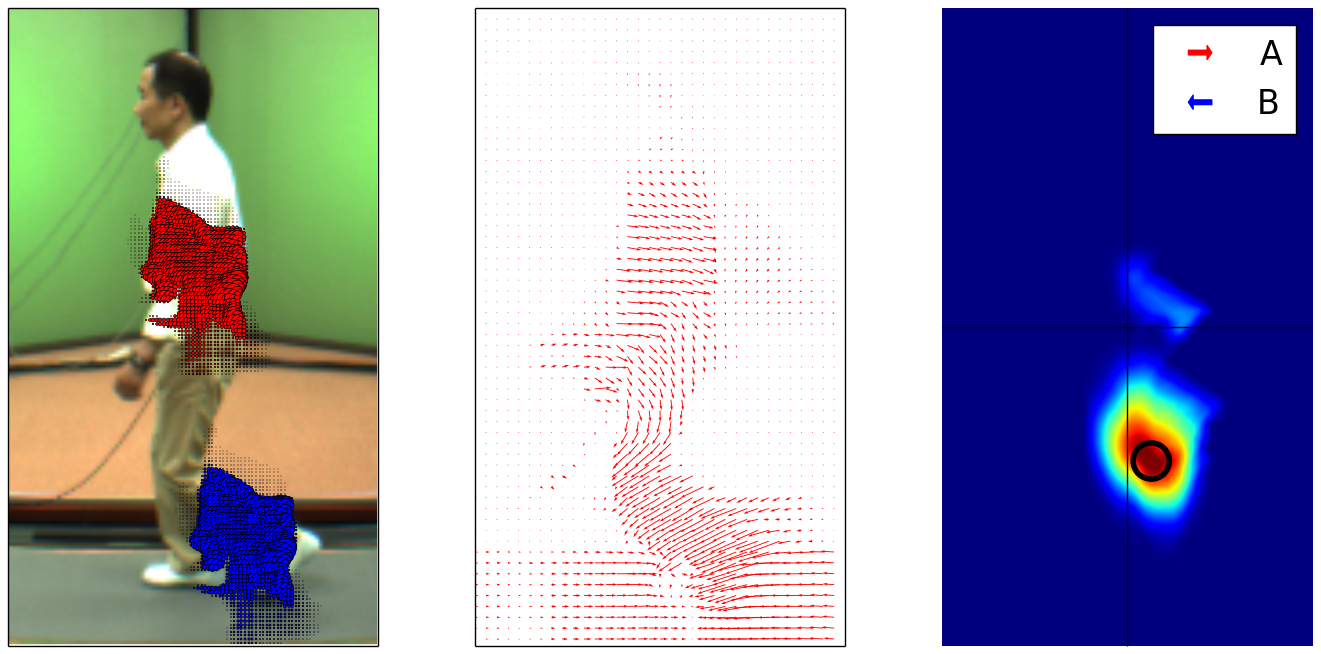 On this page, you can find the software package for the Two-Point Gait representation. Two-Point Gait is an easy-to-compute, body shape-robust image-based representation of human gait. The representation works by modeling the two-point statistics of optical flow fields to primarily encode the relative motion pattern of limbs in a gait cycle. Two-Point Gait provides a faithful representation of the pure gait of a person rather than entangling body shape and gait together. This allows the representation to provide powerful discriminative information that can enhance recognition performance when body shape is known to vary.
On this page, you can find the software package for the Two-Point Gait representation. Two-Point Gait is an easy-to-compute, body shape-robust image-based representation of human gait. The representation works by modeling the two-point statistics of optical flow fields to primarily encode the relative motion pattern of limbs in a gait cycle. Two-Point Gait provides a faithful representation of the pure gait of a person rather than entangling body shape and gait together. This allows the representation to provide powerful discriminative information that can enhance recognition performance when body shape is known to vary.
More detail can be found in the following paper:
- Two-Point Gait: Decoupling Gait from Body Shape
S. Lombardi, K. Nishino, Y. Makihara and Y. Yagi,
in Proc. of IEEE Fourteenth International Conference on Computer Vision ICCV’13, Dec., 2013.
[ paper ][ code ]
Please cite this work in your paper when this software is used in your research.
About the Software
The software package contains a collection of Python and C++ files for computing and analyzing the Two-Point Gait. The software assumes that the walking sequence is given as a sequence of images. There are three main steps for computing the Two-Point Gait: 1) (optionally) computing the bounding box for the subject, 2) computing the optical flow of each image in the gait sequence, and finally 3) computing the actual Two-Point Gait.
To accomplish this, the software package includes the following:
- Code for computing bounding boxes of subjects from silhouette images
- Code for computing optical flow using the SimpleFlow method included with OpenCV
- Code for computing Two-Point Gait from a sequence of optical flow fields
For analysis, the following are provided:
- Code for visualizing the Two-Point Gait
- Code for computing and visualizing the gait space
- Code for computing the learned distance metric
- Code for computing a distance matrix between the a probe and gallery set
- Code for plotting the ROC curves and computing the EER for a distance matrix
Please note that this is research software and may contain bugs or other issues–please use it at your own risk. If you experience major problems with it, you may email us, but please note that we do not have the resources to deal with all issues.
Dependencies
The software is written in Python and C++ and depends on the following libraries: